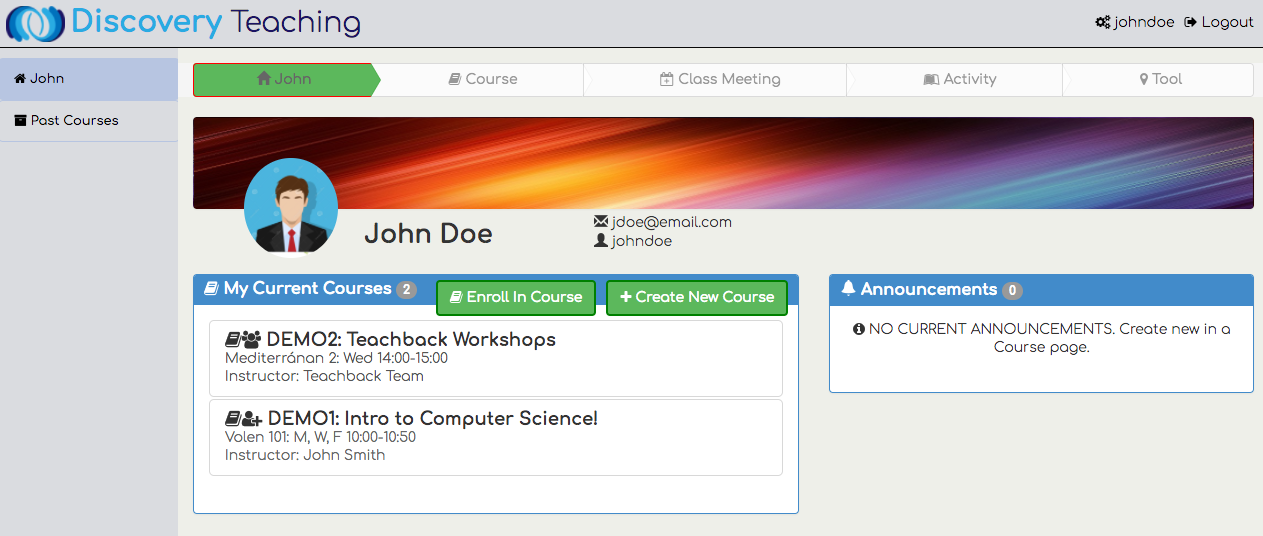







































Discovery Teaching
Disrupting Learning & Teaching
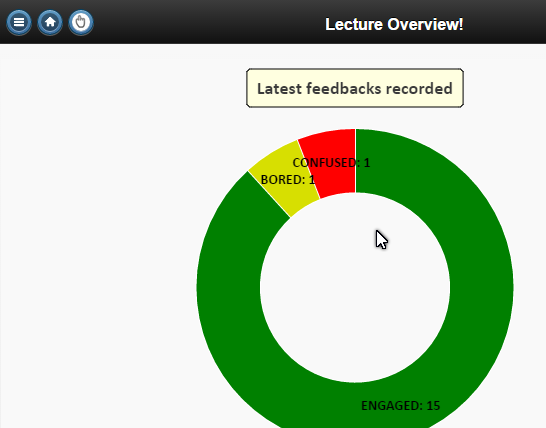
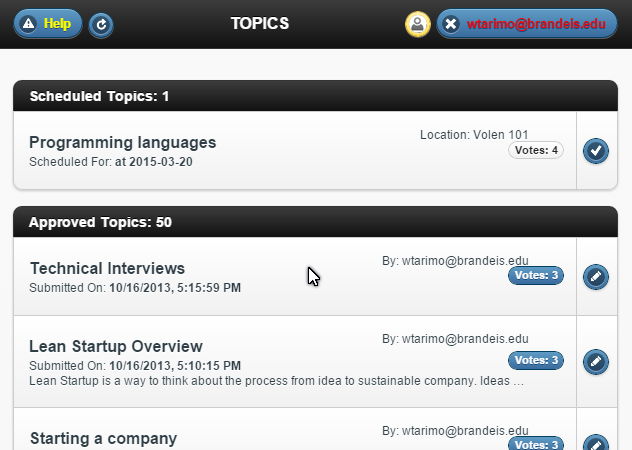
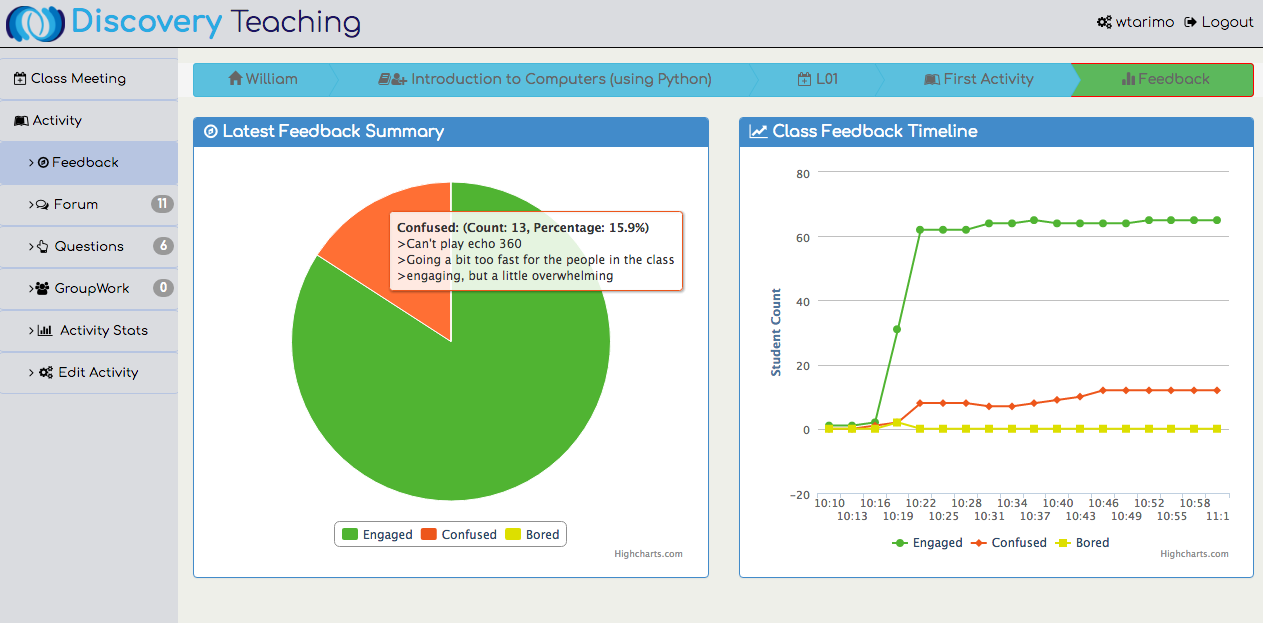
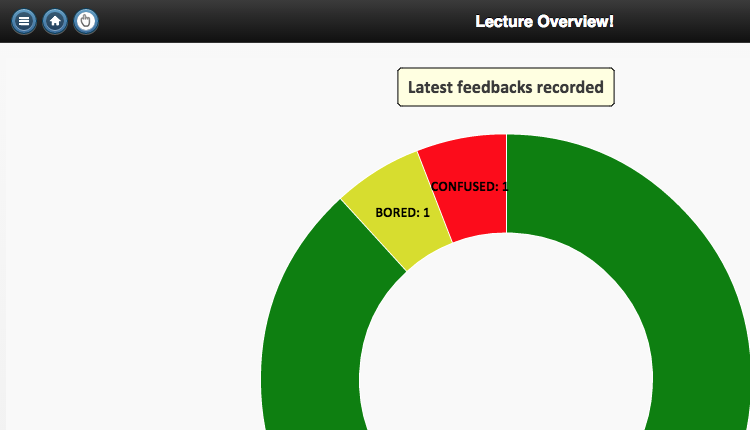
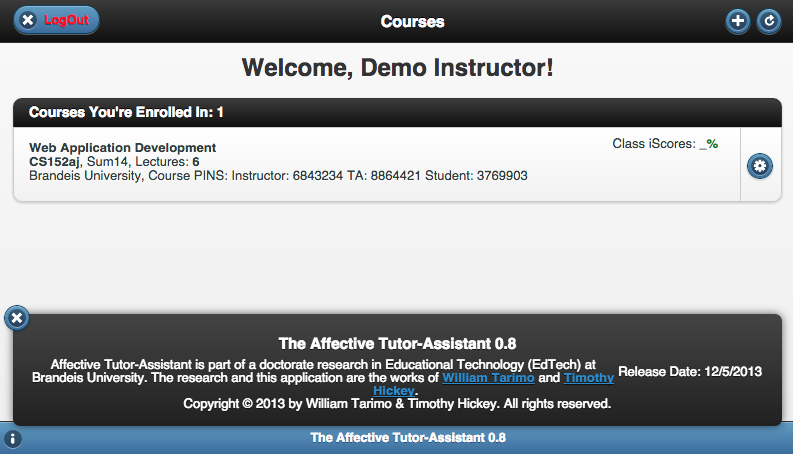
Discovery Teaching is a lightweight clicker-based audience response system with additional features for supporting back channel communication and feedback from the students. It also provides statistics on student performance in formative assessments and participation. Discovery Teaching allows students and instructors to engage in online dialogs and discussions about class material. These discussions can be driven by the instructor or left to the back channel among students alone. We provide functionality for students to give instantaneous personal cognitive and affective feedback to the instructor on how the students are feeling about the class. Students can give feedback at various points during the lecture of their own choice. Alternatively, an instructor can ask all students for feedback at any particular point. Discovery Teaching allows for a highly interactive pedagogy that involves all of the students, TAs and the instructor.