In our first experiments we conceived a Lego plate affixed to a table (fig.
2.14) and evolved 2D structures to reach a target point, using
as fitness function a normalized distance to the target point,
|
|
(where S is the structure, T the target point and d the
euclidean distance).
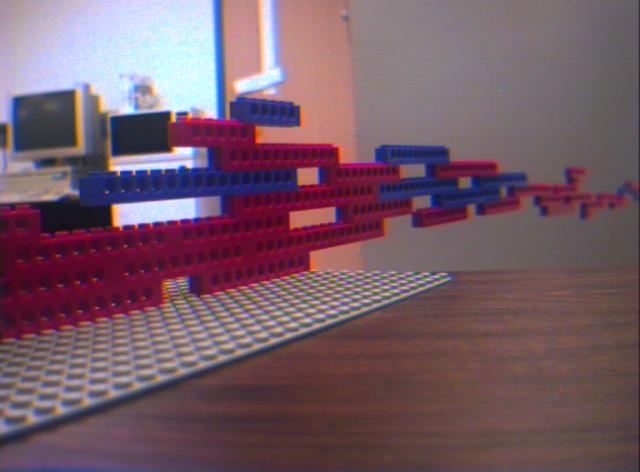
With a target point T located horizontally and away from the plate we
generated a Lego bridge (figs. 2.2 and 2.15).
Moving T to a remote position we obtained the ``long bridge'' (fig.
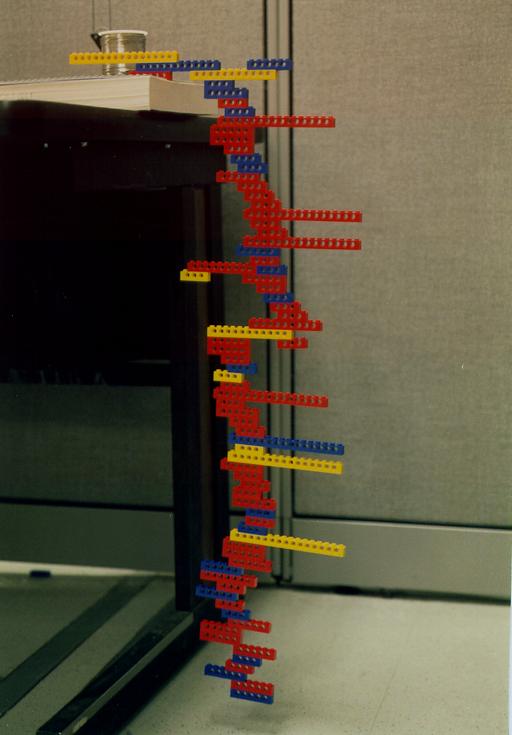
2.20), and putting T below we generated a descending structure,
a ``scaffold'' (fig. 2.16).